



但是作为消费者来说,我们其实更加关心,这些所谓的智能驾驶技术对日常用车能有多大帮助?有没有必要多花这些钱?所以,如车前,就能对一款车的智能驾驶技术水平进行比较深度的了解和体验,当然是再好不过了。
别说,其实这还真不难实现。因为对于业内的工程师们来说,通常在接触到一款新车时,都会以车外观察→车内静态体验→道路实际驾驶体验这样一套流程对一款车的智能驾驶技术水平以及主动安全系统进行一个大概的了解。下面,就让我们跟随专业工程师的视角,以长安福特翼虎这款车,进行一次“实战演习”。

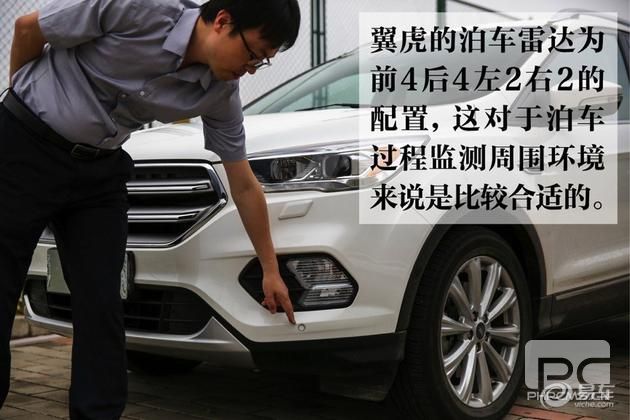
车辆如果想要实现智能驾驶,自然是少不了各种传感器,常见的有毫米波雷达、摄像头、超声波雷达以及激光雷达。其中超声波雷达主要在泊车时起作用,也就是我们经常说的倒车雷达。我们主要关注数量以及分布的位置。比较良心的车辆都是前4后4左2右2的配置,这对于泊车过程监测周围环境来说是比较合适的。而一些车型由于成本控制,只能相应减少超声波雷达个数。
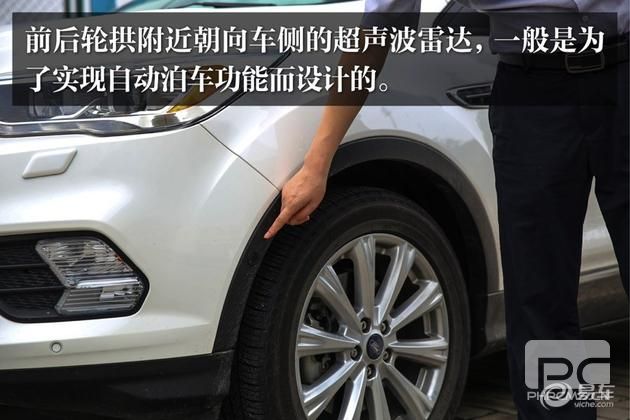
在布置位置方面,通常SUV都需要把超声波雷达布置在前后保险杠相对靠下的位置,有助于探测较低的障碍物。而前后轮拱附近朝向车侧的超声波雷达,一般是为了实现自动泊车功能而设计的。
前向的毫米波雷达主要用于探测与前车的距离以及前车的速度,实现前撞预警FCW、自动紧急制动AEB、自适应巡航ACC等主动安全领域的功能。侧后向的毫米波雷达则主要用于监测车辆后方两侧的车道是否有车、可否进行变道,实现盲区检测BLIS等功能。

至于激光雷达,由于成本和结构的原因,目前只有奥迪、沃尔沃和福特的部分车型有配备,还是比较罕见的。我们所体验这台翼虎的激光雷达布置在摄像头旁边,不过它并非像现在常见的做自动驾驶的激光雷达那样依靠旋转来进行环境感知,而是以“品”字型的3个区域发射出去,虽然效果略逊于旋转激光雷达,但是也能对智能驾驶方面起到非常大的作用。

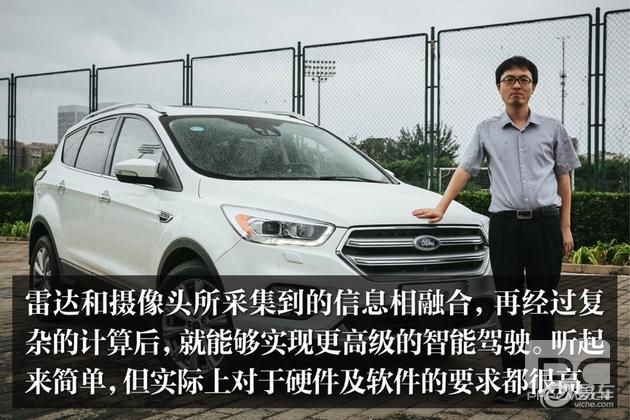
再说摄像头,它是高级驾驶辅助系统(ADAS)的主要视觉传感器,通过将采集到的图像转化为电脑能处理的数字信号,从而实现感知车辆周边的路况,实现前向碰撞预警,车道偏移报警,交通标志识别和行人检测等功能。雷达和摄像头所采集到的信息相融合,再经过复杂的计算后,就能够实现更高级的智能驾驶。这一过程听起来简单,但实际上对于硬件以及软件的要求都很高。
进入车内,我们主要会关注中控屏以及仪表盘上的显示及设置。对于配备倒车影像的车型,通常会先挂入倒挡。体验倒车影像的清晰度以及有没有随方向盘转动而显示的倒车轨迹辅助线,当然在夜间的辨识度也是比较重要的。
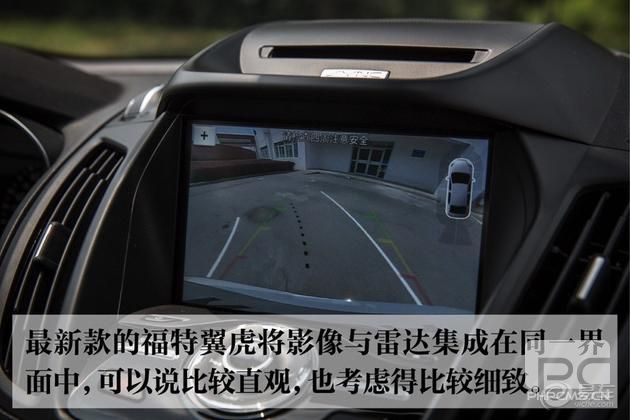
翼虎这台车的倒车影像启动时,屏幕右上角还会显示出倒车雷达对于车辆周围的障碍物探测情况,也就是说将影像与雷达集成在同一界面中。这在上一代车型上是没有的,可以说考虑得比较细致。
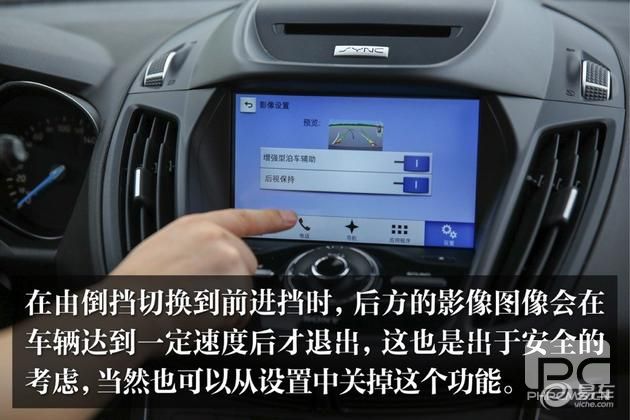
另外,在由倒挡切换到前进挡时,后方的影像图像会在车辆达到一定速度后才退出,这也是出于安全的考虑。当然,如果驾驶员不习惯这种操作,还可以从设置中关掉这个功能。
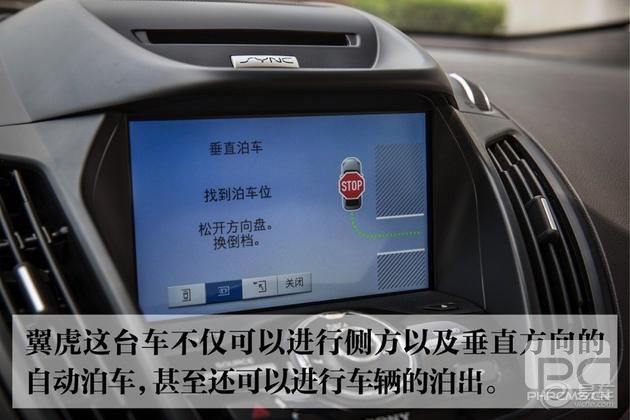
既然说到倒车影像,就顺便聊聊自动泊车。最基础的自动泊车系统可以实现平行泊车,也就是侧方停车,再高级一些可以实现垂直泊车,这两种基本可以解决我们日常生活中90%以上的停车难题。而翼虎这台车不仅可以进行侧方以及垂直方向的自动泊车,甚至还可以进行车辆的泊出,驾驶员只需要操作换挡杆以及制动踏板就可以了,可以说是所有新车司机们的福利了。
在车位的识别率上,如果是侧方停车,只要车位比比整车长度长900mm左右,车辆距离车位的横向距离不超过1米9,翼虎都可以完美探测到。如果是垂直停车,也要求车位比整车宽度宽900mm左右,这样可以保证停车后车内乘员正常上下车。

当然,新款翼虎还增加了CTA两侧来车预警系统。通过位于隐藏在前后保险杠内的雷达,可以感知车前或车后的左右两侧是否有车经过。这在从垂直停车位驶出时,或是通过视线不是特好的十字路口时,都可以协助驾驶员判断,提高行车安全。

接下来,就该进入实际道路进行体验,我们先从巡航系统开始。最基础的巡航系统,在车辆达到某速度时开启,就可以让车辆保持当前车速匀速行驶,通过拨杆或按键加减车速。如果要想解除巡航功能,可以通过按键关闭,或是踩下刹车踏板。因此基础的巡航系统只适合车辆较少的高速公路,如果在复杂的城市路上开启,反倒会增加驾驶员的精力投入。

所以才有了ACC自适应巡航系统,我们可以简单将其理解成跟随前车功能。当车速超过30km/h时,即可开启ACC自适应巡航功能,驾驶员只需要设定一个目标车速,车辆便会以这个车速匀速前进。如果前方的车辆速度低于设定值,位于车辆前方的毫米波雷达会实时监测,ACC控制系统控制车速降低,并保持与前车的距离,不用驾驶者操作油门或刹车踏板。对于翼虎这台车来说,在车速低于20km/h时,ACC系统便会自动解除,也就意味着在速度较低时需要驾驶员接管车辆。而在整个提速和制动的过程中,系统对加速和减速的控制比较平缓,并不会有突兀的感觉。

当然更为高端的ACC自适应巡航系统可以做到跟随前车刹停后,再自动起步继续进行跟随,我们管这种叫做全速ACC。当然这种成本也会更高,基本只有非常高端的车型才会配备。
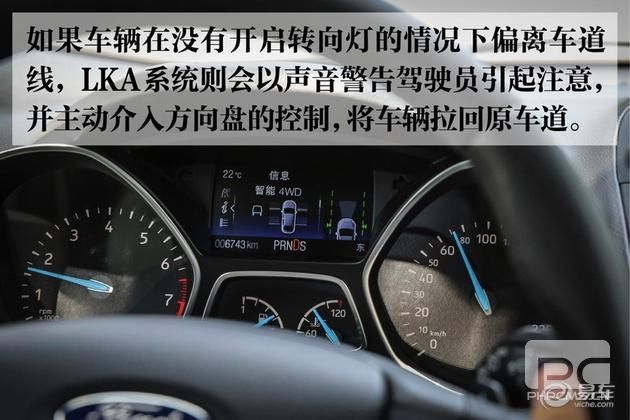
体验过ACC后,下一步我们一般会体验LKA车道偏离辅助系统。也只有同时具备ACC和LKA功能的车辆,才算是实现了L2级别的智能驾驶。当车速大于60km/h时,仪表盘上的车道线指示标识便会变为绿色,这意味着LKA车道保持系统已经启动。位于前风挡上的摄像头会对车道线进行实时识别,当发现车辆距离某侧车道线较近时,仪表盘上的该侧指示线会变为黄色。而如果车辆在没有开启转向灯的情况下偏离出车道线,系统则会以声音警告驾驶员引起注意,并主动介入方向盘的控制,将车辆拉回原车道。
虽然很多车型同样叫做车道保持或车道偏离辅助系统,其实也分为不同的级别。最基础的是只具备提醒或警示功能,在车辆偏离当前车道时,会发出报警音或方向盘振动提示驾驶员。再高级一点的车道保持系统,会在车辆偏离后纠正车辆,但系统只会在车辆快压边线时才主动介入,因此车辆的行驶路线会呈S型。更高级的车道保持系统,会通过位于正前方的摄像头监测车道线,时刻保持车辆行驶在车道的正中间。
当然对于L2级及以下的智能驾驶系统,都要求驾驶员对驾驶过程负责,对于这款翼虎车型,如果驾驶员长时间放开方向盘(10s以上),或LKA系统连续纠正超过3次,车道偏离辅助系统就会默认退出并提醒驾驶员接管。而如果驾驶员多次开启该功能,又多次因为偏离车道而造成系统退出,系统会认为驾驶员现在处于疲劳状态,而提醒驾驶员应立刻休息。

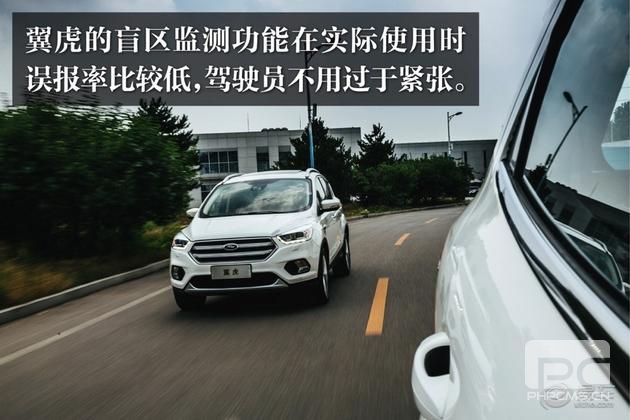
上面两个功能需要在特定条件下才能触发,而接下来要体验的BLIS盲区监测系统可以说是日常驾驶中经常用到的。通过位于后轮两侧的雷达监测左右车道的来车,当某侧车辆进入盲区时,该侧后视镜上的提示灯便会点亮,提醒驾驶员注意。这个功能对于新手司机在城市路况驾驶时,确实能够减少很多危险的发生。

翼虎这个功能在实际使用时误报率比较低,而有些盲区监测在车道一侧是护栏或水泥墩时会持续报警,照理说这样的障碍物应该是过滤掉的。因为持续的报警会让驾驶员精神紧张,同时在真正后方有来车时,降低对系统的信任度。
最后我们再说ACS低速行车安全系统。当车速不高于80km/h时,ACS低速行车安全系统便会开启。当传感器探测到过于接近前方车辆或障碍物而驾驶者尚未采取制动措施时,系统会通过发出滴滴警报音及位于驾驶员正前方的红灯频繁闪烁的方式来提醒驾驶员。而在紧要关头,会主动介入进行制动,避免事故的发生或将碰撞损失降到最低。

这个功能我们在进行驾驶体验时一般是不做主动测试的,因为风险比较大,正规的测试都会在前方放置假车。当然我们在日常驾驶时,有一种场景比较容易触发警报,就是在前方车辆减速,而我们希望以较快速度并线时。由于与前车速度差异较大,所以此时系统有可能发出警报。但因为此时还不构成潜在撞车危险,所以系统一般不会介入制动。

以上这些便是工程师们在接触到一款新车时对智能驾驶技术水平的体验过程。如果大家也希望在购车前,对一款车进行一个比较全面的了解,切记一定要在保证安全的前提下进行体验。综合来看我们这次所体验的福特翼虎,以它的价位和定位,能够配备ACC、LKA、BLIS、ACS、自动泊车等等这些智能驾驶功能,可以说是非常良心的了。
汽车电子网为您提供最新汽车电子产品信息,及最具权威行业资讯和最新的行业动态,汽车电子行业最前沿的技术资讯,为全球汽车电子行业人士搭建交流平台。