



有四种类型的传感器为车辆提供外部和即时信息,每种传感器都有优点和缺点。传感器类型是:
激光雷达 - 一种测量技术,通过用激光照射目标来测量距离。激光雷达是光探测和测距的。
雷达 - 一种物体探测系统,使用无线电波来确定物体的范围,角度或速度。
超声波 - 一种发射超声波声音的物体检测系统,可以保存并检测它们的返回以确定距离。
被动视觉 - 使用被动相机和复杂的物体检测算法来了解相机可见的内容。
每种技术都有不同的优点和缺点。
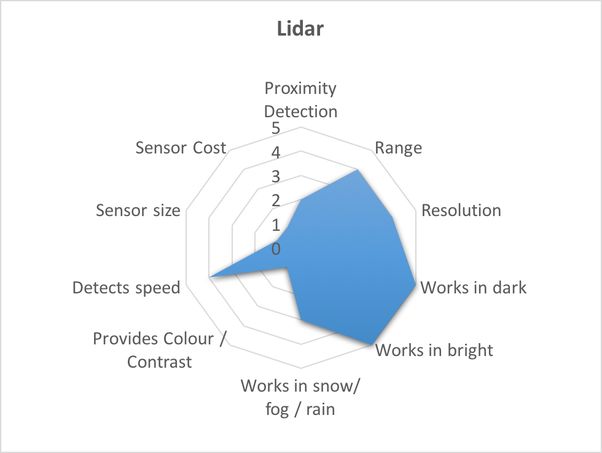
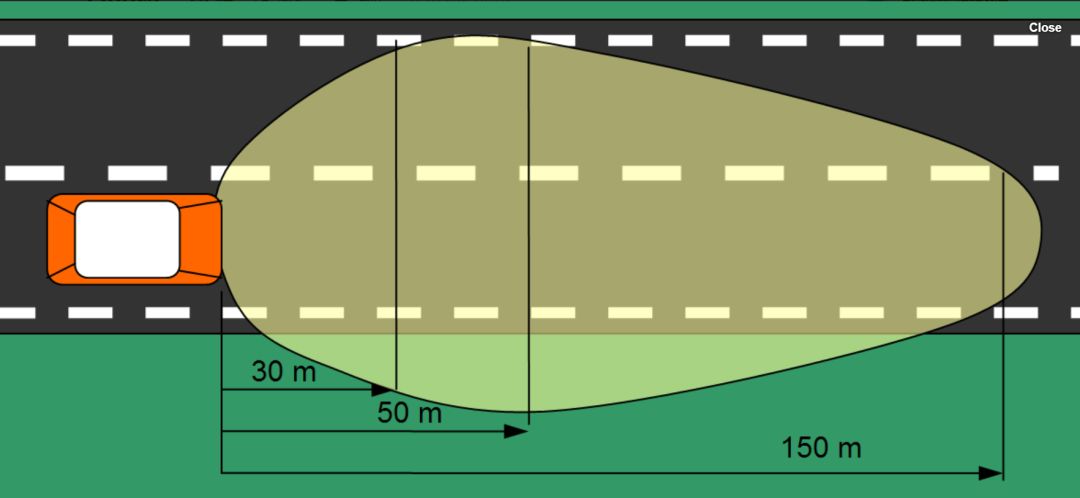
激光雷达目前是大而昂贵的系统,必须安装在车辆外面。例如,Google必须安装在车辆顶部,视线无障碍。目前的实施方案已经基本上从早期的30米范围到150米到200米改进了范围,同时分辨率也提高了。目前,具有更高范围和分辨率的生产系统仍然是昂贵的。激光雷达在所有光线条件下都能很好地工作,但由于使用了光谱波长,它们开始因空气中的雪,雾,雨和尘埃颗粒的增加而失效。激光雷达无法检测颜色或对比度,也无法提供光学字符识别功能。
代表制造商包括Continental AG,LeddarTech,Quanergy和Velodyne。
谷歌的自动驾驶汽车解决方案使用激光雷达作为主要传感器,但也使用其他传感器。特斯拉目前的解决方案并未包含激光雷达(虽然姊妹公司SpaceX确实如此)以及过去和现在的声明表明他们认为自动驾驶汽车不需要。
Quanergy展示了一种近乎量产的固态激光雷达系统,该系统预计有150米的范围,250美元的成本和足够的分辨率。该装置仍然比所有其他传感器大得多,而且价格昂贵,但价格和尺寸与预期的性能将使它成为一个非常有竞争力的传感器,如果它生产。这个价格/性能点可能会让它更有可能包含在特斯拉中,并且已经发现了一个安装在顶部的传统激光雷达的特斯拉Model S。

固态雷达芯片系统很常见,体积小,价格低廉。它们具有良好的范围,但比其他传感器的分辨率更差。它们在明暗条件下同样工作良好,77 GHz系统能够更好地感知雾,雨和雪,这会导致激光雷达和被动视觉系统的挑战。与激光雷达一样,雷达无法进行颜色,对比度或光学字符识别。雷达在确定当前实施中的交通相对速度方面非常有效。虽然传感器尺寸使其更接近近距离探测,但它们在极短距离内的效率低于声纳。
代表制造商包括德尔福,京瓷,法雷奥和伟世通。

超声波传感器主动发出高于人类听觉水平的高频声音。它们具有非常差的范围,但是对于非常近距离的三维映射非常好,因为声波相对较慢,因此可以检测到一厘米或更小的差异。无论光照水平如何,由于距离短,它们都可以在雪,雾和雨的条件下同样良好地工作。与激光雷达和雷达一样,它们不提供任何颜色,对比度或光学字符识别功能。由于它们的射程短,因此无法用于测量速度。它们小而便宜。
代表性的制造商包括Bosch,Valeo,Murata和SensorTec。
近年来,相机图像识别系统变得非常便宜,小巧且高分辨率。它们的颜色,对比度和光学字符识别功能为其提供了一个全新的功能集,完全没有其他所有传感器。它们具有最佳的传感器范围,但光线条件良好。它们的范围和性能随着光线水平变暗而降低,开始依赖于 - 就像人眼一样 - 依赖于汽车前灯的光线。在非常明亮的条件下,一些实施显然可能无法识别明亮天空下的轻物体,据报道这是2016年5月特斯拉自动驾驶仪相关死亡事故的一个因素在佛罗里达州 数字信号处理可以确定速度,但不能达到雷达或激光雷达系统的精度水平。
代表性的制造商包括Mobileye,Delphi,Honeywell和Toshiba。
Mobileye 宣布,由于对使用方面存在分歧,它将不再为特斯拉提供解决方案,并将专注于完全自主的解决方案。Mobileye目前的实施已经承认了分辨率和侧面碰撞检测的局限性,其中第二个预计将包含在即将推出的新产品版本中。
一种较便宜,功能齐全的折衷方案
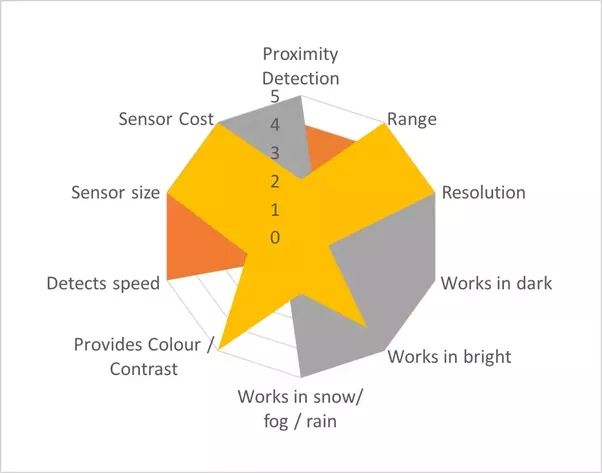
特斯拉对这些因素进行了评估,得出的结论是,有效的完整传感器组不需要激光雷达。根据其传感器的实现,上面的重叠图表显示这是明智的。特斯拉上目前的传感器可能具有与单个下一代尚未生产的固态激光雷达传感器相同的硬件成本,但在大多数情况下可提供出色的性能。
它看起来缺乏在黑暗中的良好分辨率成像,其中激光雷达比低分辨率雷达有优势。
不同条件下的优劣势
值得关注的是不同条件下传感器性能的显着差异。下图提供了基于不同传感器类型的各种技术实现的粗略平均值的传感器范围和锐度的粗略近似值。

范围以米为单位。Acuity是基于分辨率,对比度检测和颜色检测的组合的断言值。
显然,被动视觉在条件允许的情况下具有最长的范围和最佳的敏锐度,同样显然它在不利条件下可以提供的信息质量方面迅速降低。
黑暗中的范围基于现代车灯照亮前方路径,但前灯照亮的宽度更小,对比度和色彩都受到影响。选择的值假设汽车不在光线充足的道路上,而是在没有任何重要路灯且没有月球照明的道路上。在没有云层和/或有很多路边灯下,视觉传感器可以收集更多信息,但是阴影也可以使识别具有挑战性。
从这次评估中可以明显看出,雷达虽然不是所有条件下的最佳传感器,但在较高速度下探测车辆和其他物体所需的范围内,其降幅最小。激光雷达更好,直到大雾,大雪或大雨发生大气浑浊,但在这些条件下会降低。
这一评估引出了一个问题,即应该对自动驾驶汽车的信息质量有多大依赖。雷达的低灵敏度是否足以识别大多数物体和车辆,使得汽车在安全的情况下比人类驾驶时更快?或者视力是否太低而且必须降低速度以允许其他传感器收集足够的信息以及时响应?
另一个问题是自治是否应该设计为在所有条件下可获得的最可靠信息,雷达,或者是否应该设计传感器组的假设,这些假设在更恶劣的条件下会大幅度降低?
无论是否需要激光雷达,基于单个传感器组或甚至双传感器组的解决方案都不可行。每种传感器类型都有优点和缺点,并且需要从多个传感器合并单个现实表示,以避免误报和误报。
特斯拉的一些早期陈述似乎表明他们的一个传感器识别了佛罗里达州的卡车侧,该系统解决了冲突,有利于避免误报,特斯拉预计将很快发布软件更新,更好地利用雷达系统来避免这种边缘条件。
没有一种解决方案是完美的,每种组合解决方案都有妥协,即使这些妥协的规模或不同方向的意识程度不同。这些传感器技术将以不同的方式在不同的车辆价格点组合,从而获得有效的解决方案。
汽车电子网为您提供最新汽车电子产品信息,及最具权威行业资讯和最新的行业动态,汽车电子行业最前沿的技术资讯,为全球汽车电子行业人士搭建交流平台。